Nội dung bài viết này Ngọc Automation sẽ hướng dẫn bạn đọc sử dụng PLC FX5U để sđiều khiển động cơ servo Mitsubishi MR-J4 A Series.
Để tìm hiểu về hướng dẫn sử dụng về dòng Servo này bạn có thể tham khảo tài liệu của hãng dưới đây:
https://dl.mitsubishielectric.com/dl/fa/document/manual/servo/sh030175/sh030175b.pdf
I – Đấu nối phần cứng
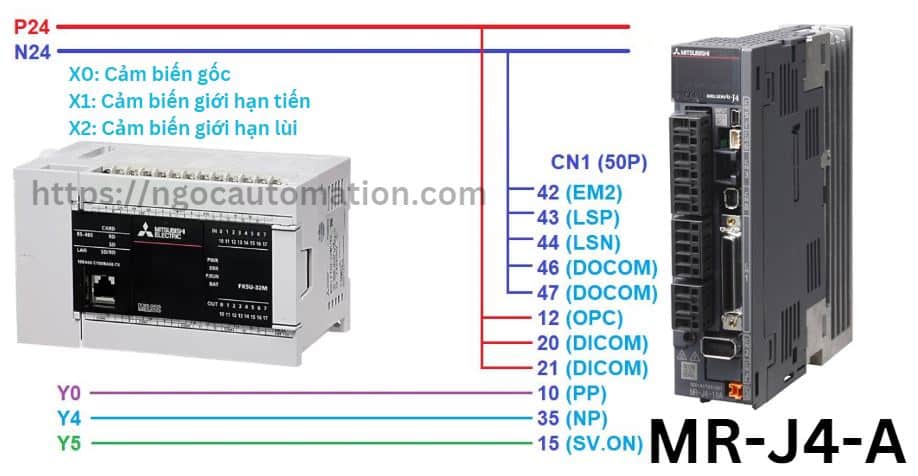
Dưới đây là sơ đồ kết nối giữa FX5U và MR-J4 A theo cách đơn giản nhất để, sau khi thành thạo các bạn có thể sử dụng các chân chức năng cấp cao khác của servo.
Bảng 1 – Bảng phân công địa chỉ vào ra PLC
| Input | Output |
| X0: Cảm biến gốc (Org Sensor) | Y0: Đầu ra xung (Pulse Output) |
| X1: Cảm biến giới hạn tiến (Forward Limit Sensor) | Y4: Đầu ra hướng (Direction Output) |
| X2: Cảm biến giới hạn lùi (Reverse Limit Sensor) | Y5: Chạy/Dừng (Servo ON/OFF) |
II – Cài đặt thông số cho MR-J4-A
Đối với Driver MR-J4-A, chúng ta cần cài đặt các thông số cơ bản như dưới đây (bạn có thể sử dụng phím trên Driver hoặc phần mềm MR-Configurator2, có thể tải xuống dưới bài viết)
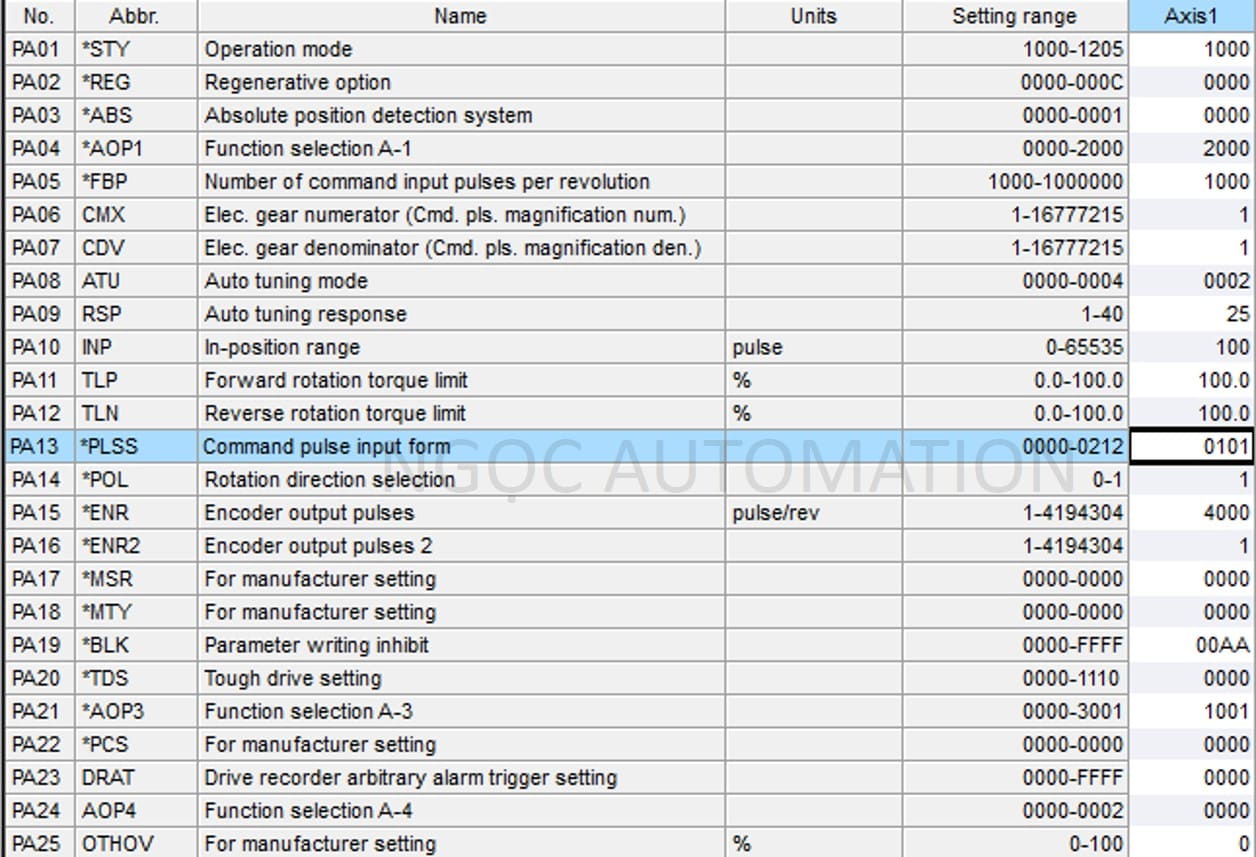
- PA1: Chọn chế độ điều khiển servo > Đặt thành “1000” để chọn chế độ điều khiển vị trí.
- PA6/7: CMX/CDV: Tỷ lệ khuếch đại xung đầu vào. Dùng để hiệu chỉnh sự thay đổi của số xung / vòng khi đưa lệnh từ PLC đến Servo. Mặc định là 1/1, tương ứng với 131072 xung / vòng.
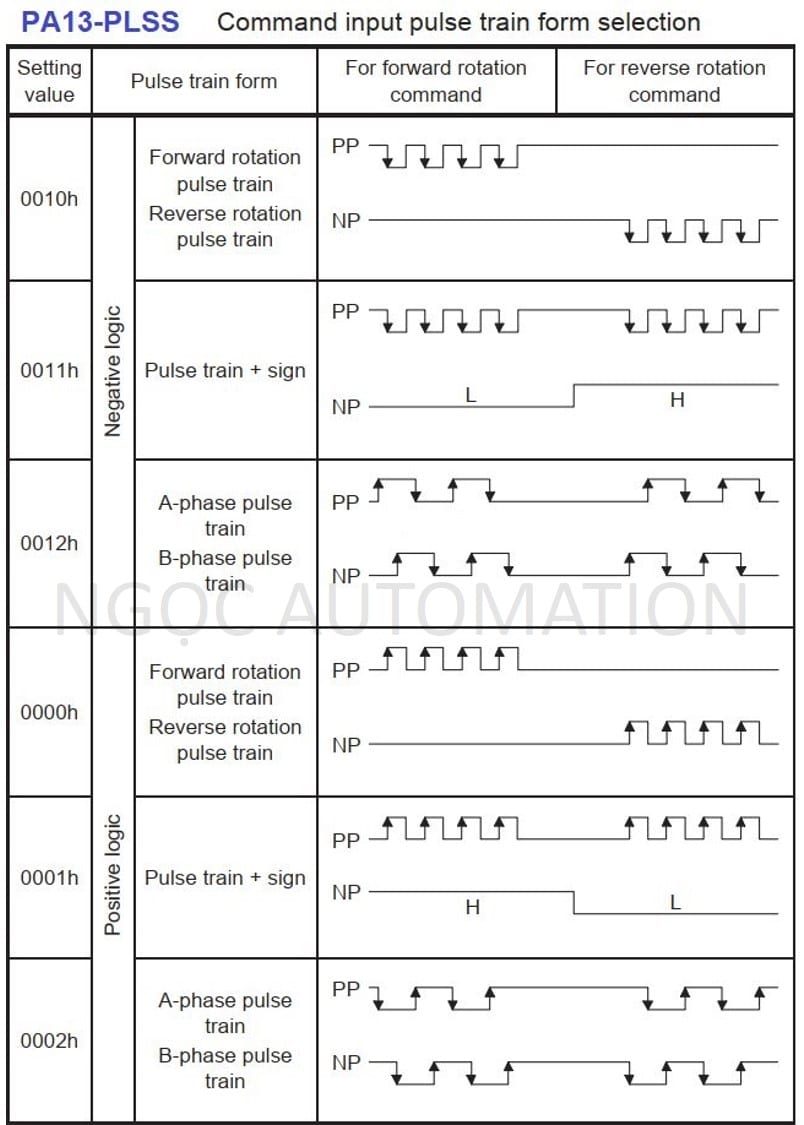
- PA13.PLSS: Chọn loại xung điều khiển: Mặc định là 0100, thay đổi hai yếu tố sau để chọn loại xung đầu vào. Bạn nên tra bảng dưới đây để chọn phương pháp điều khiển phù hợp:
Dưới đây là thông số tham khảo mình cài đặt cho drive:
III – Cấu hình Đầu ra Xung của FX5U
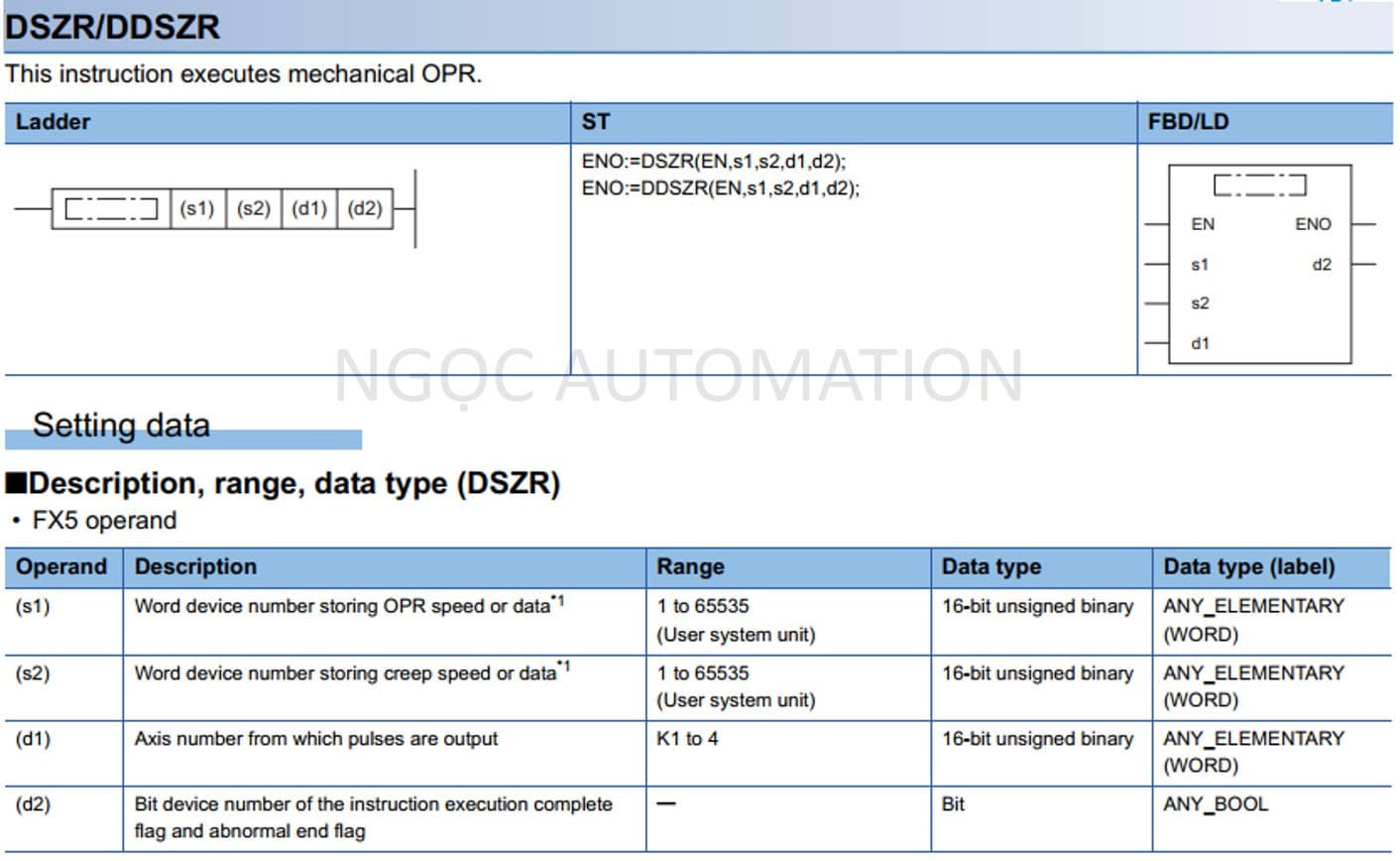
3.1. Lệnh Trở về gốc (Zero Return)
3.2. Lệnh Đầu ra xung tăng dần (Increment Pulse Output)
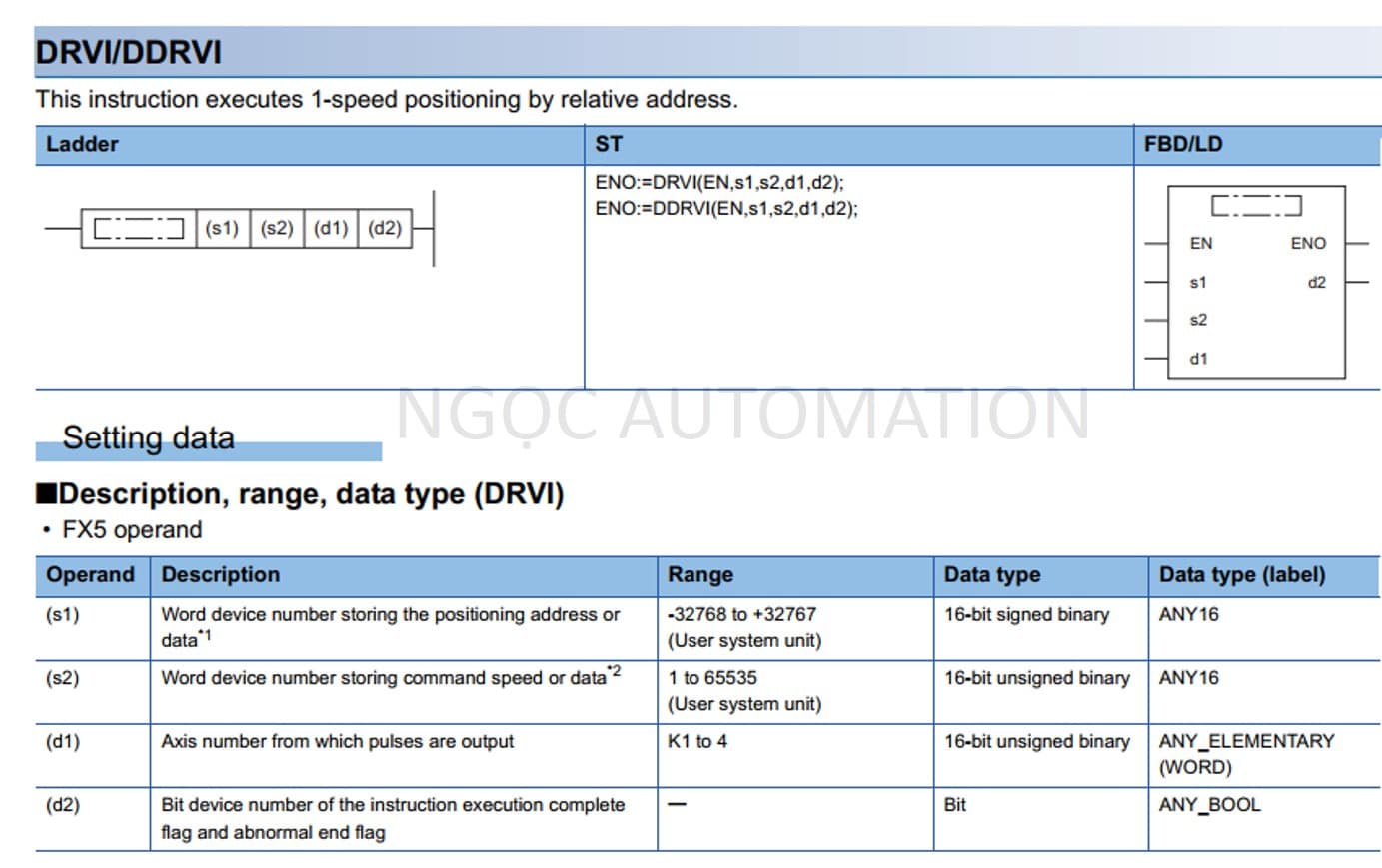
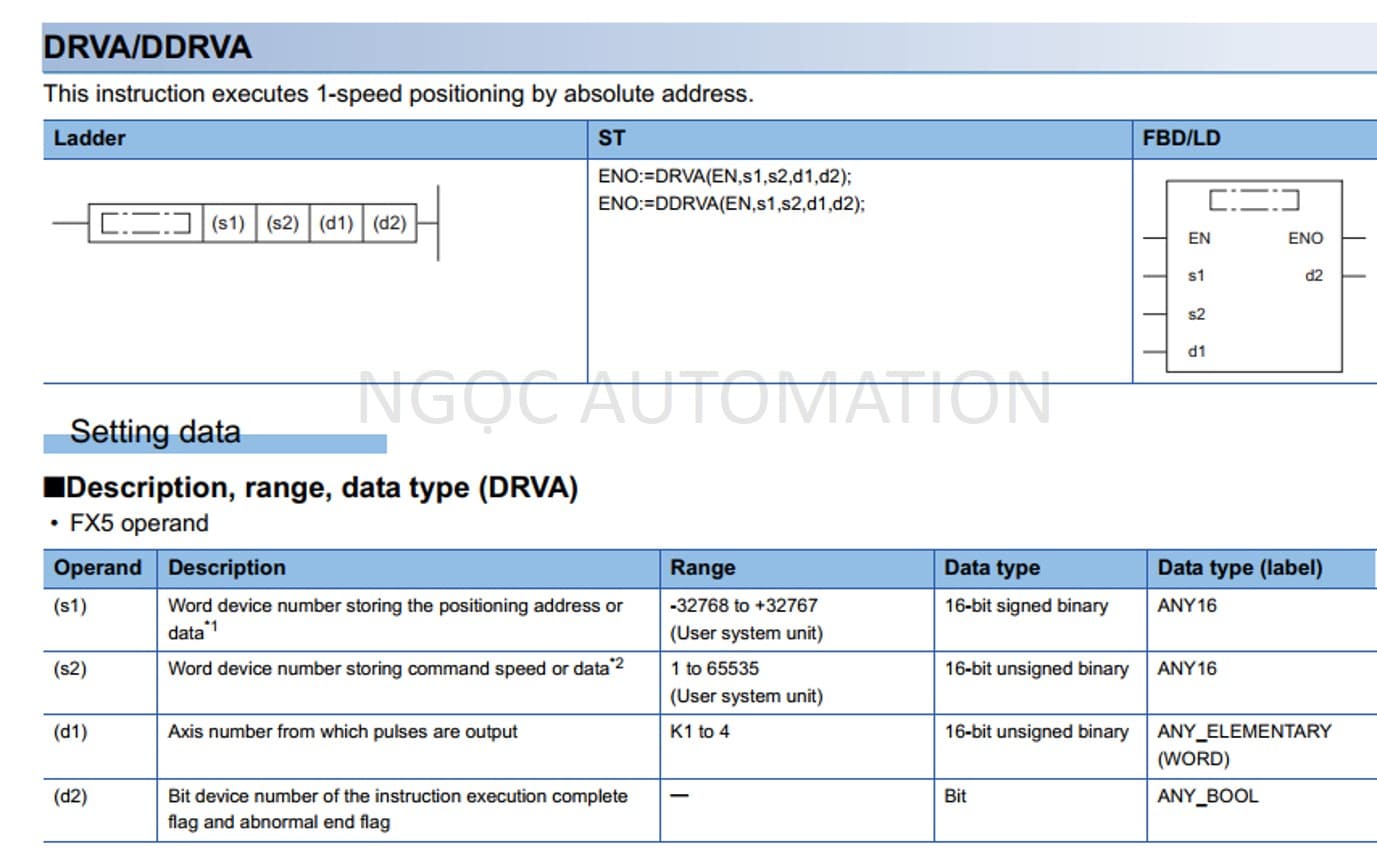
3.3. Lệnh Đầu ra xung tuyệt đối (Absolute Pulse Output)
IV – Cấu hình các bit và thanh ghi đặc biệt
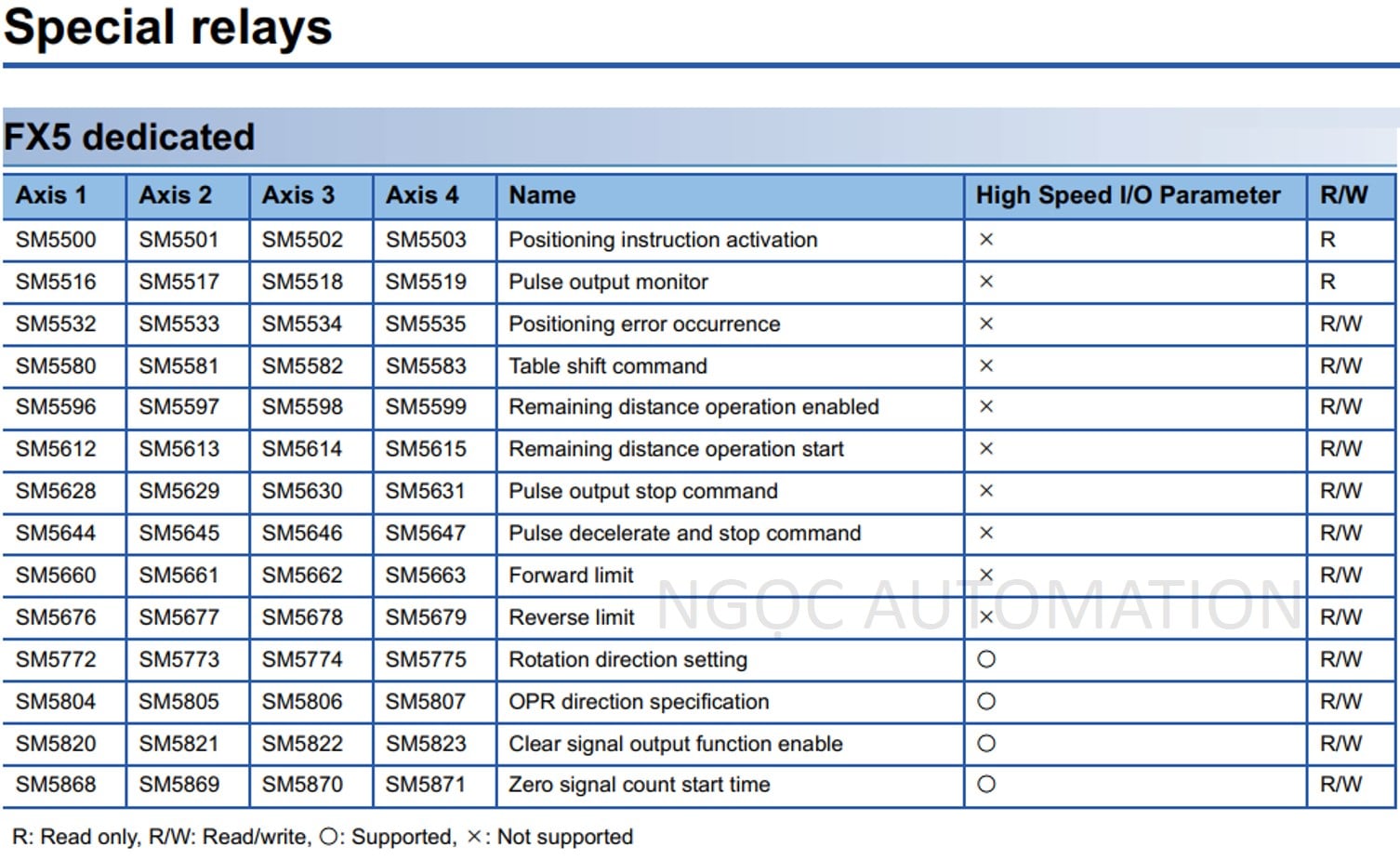
4.1. Các bit đặc biệt
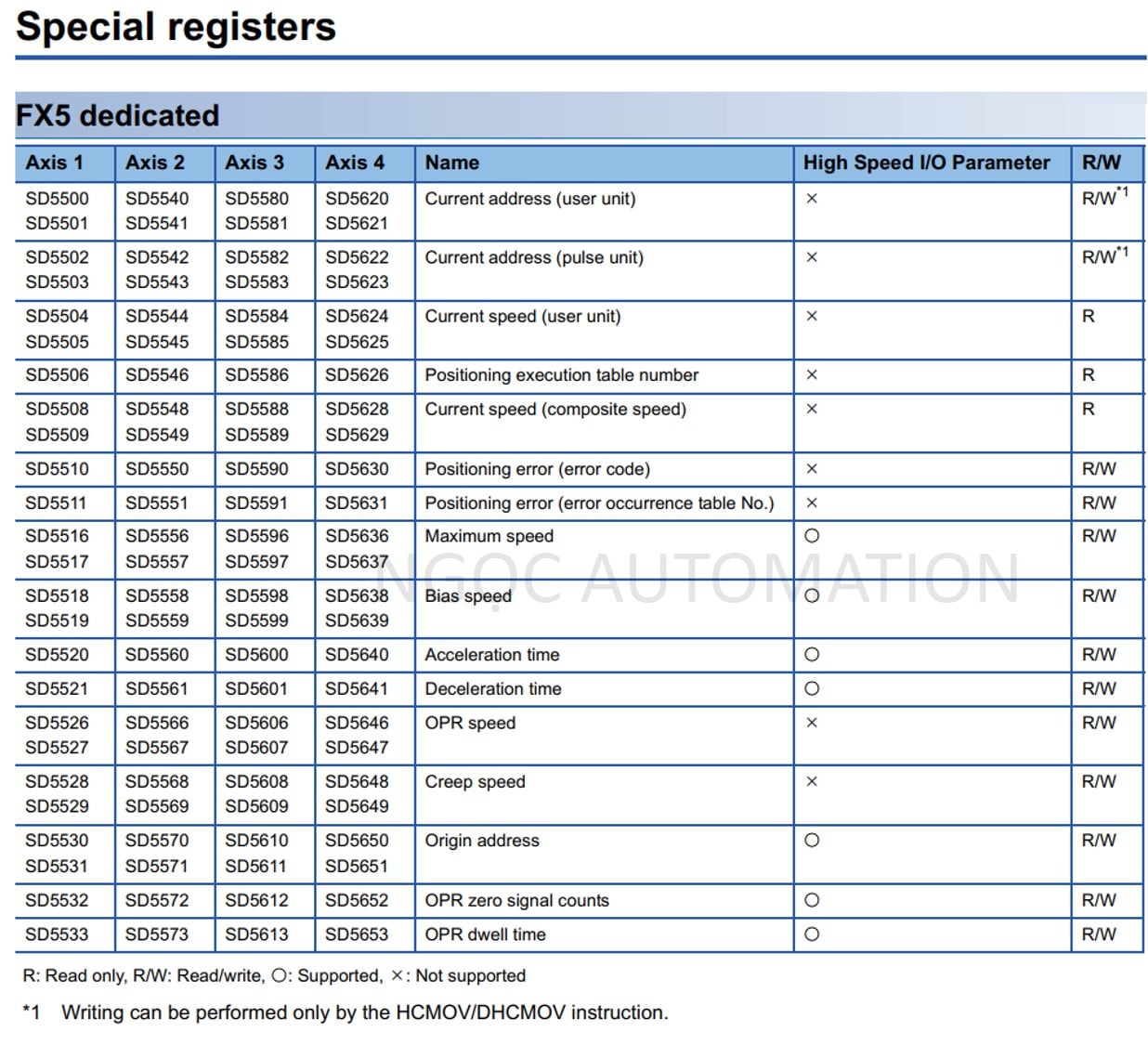
4.2. Các thanh ghi đặc biệt
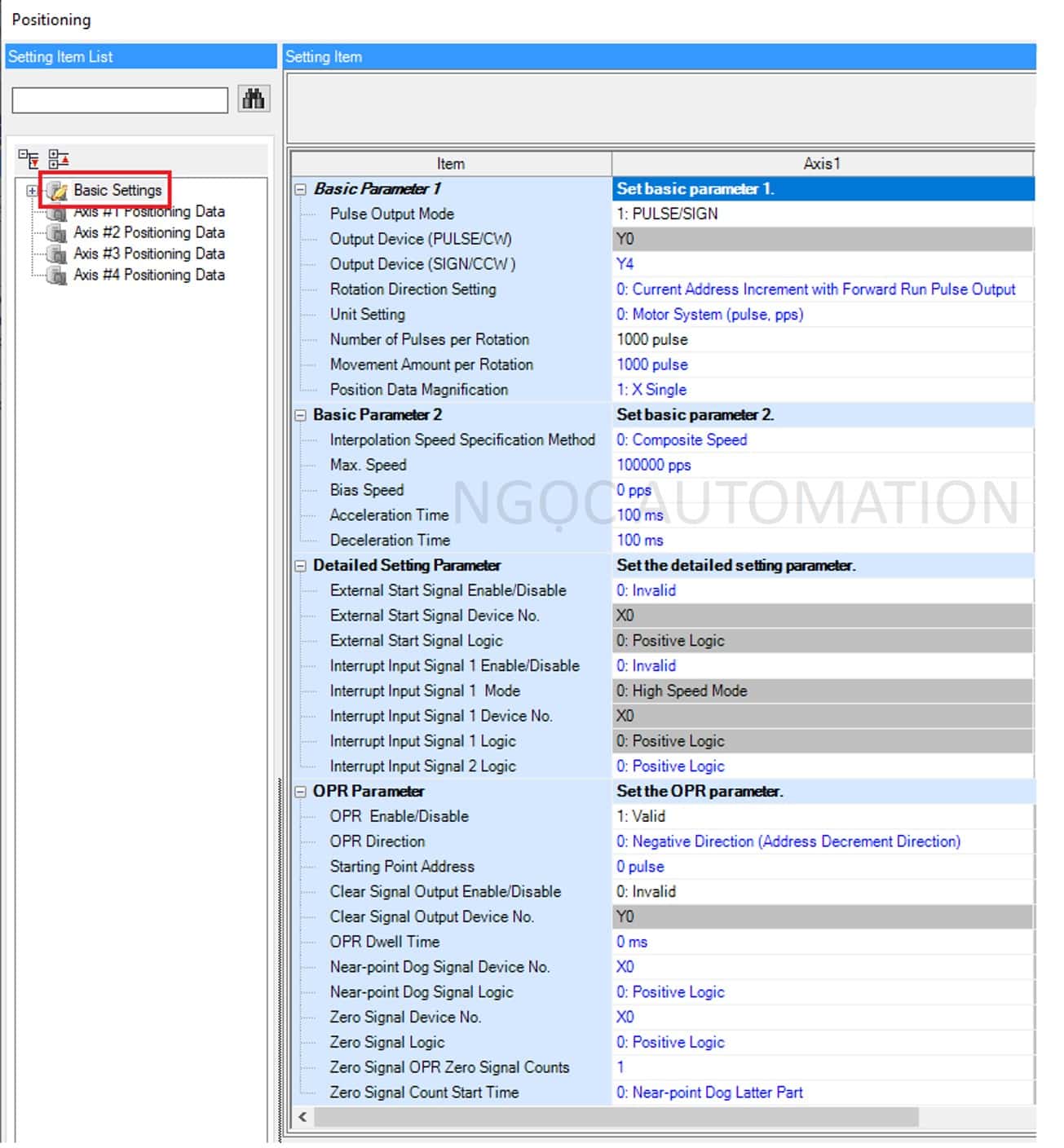
V – Cấu hình phát xung tốc độ cao
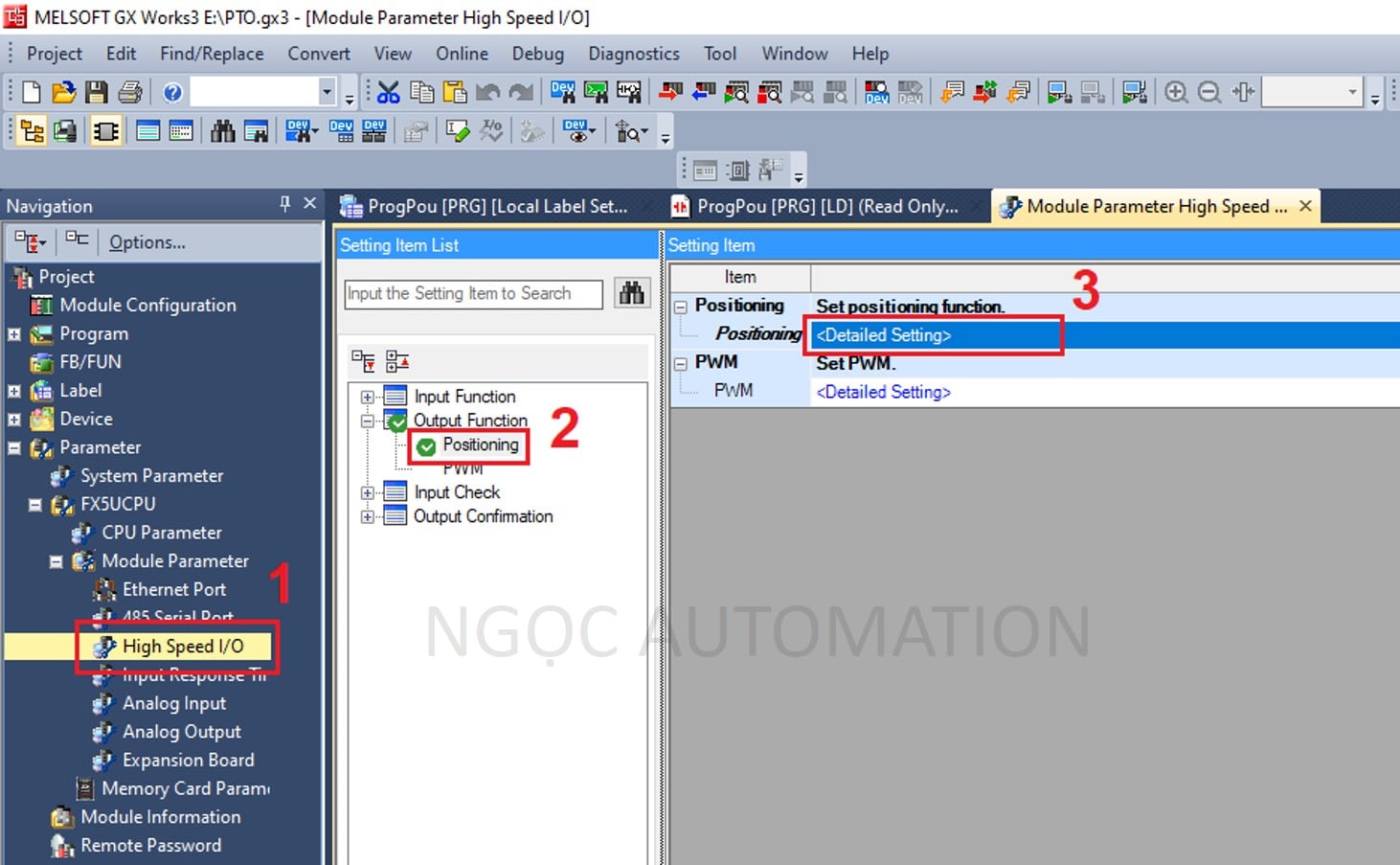
5.1. Cấu hình xung tốc độ cao
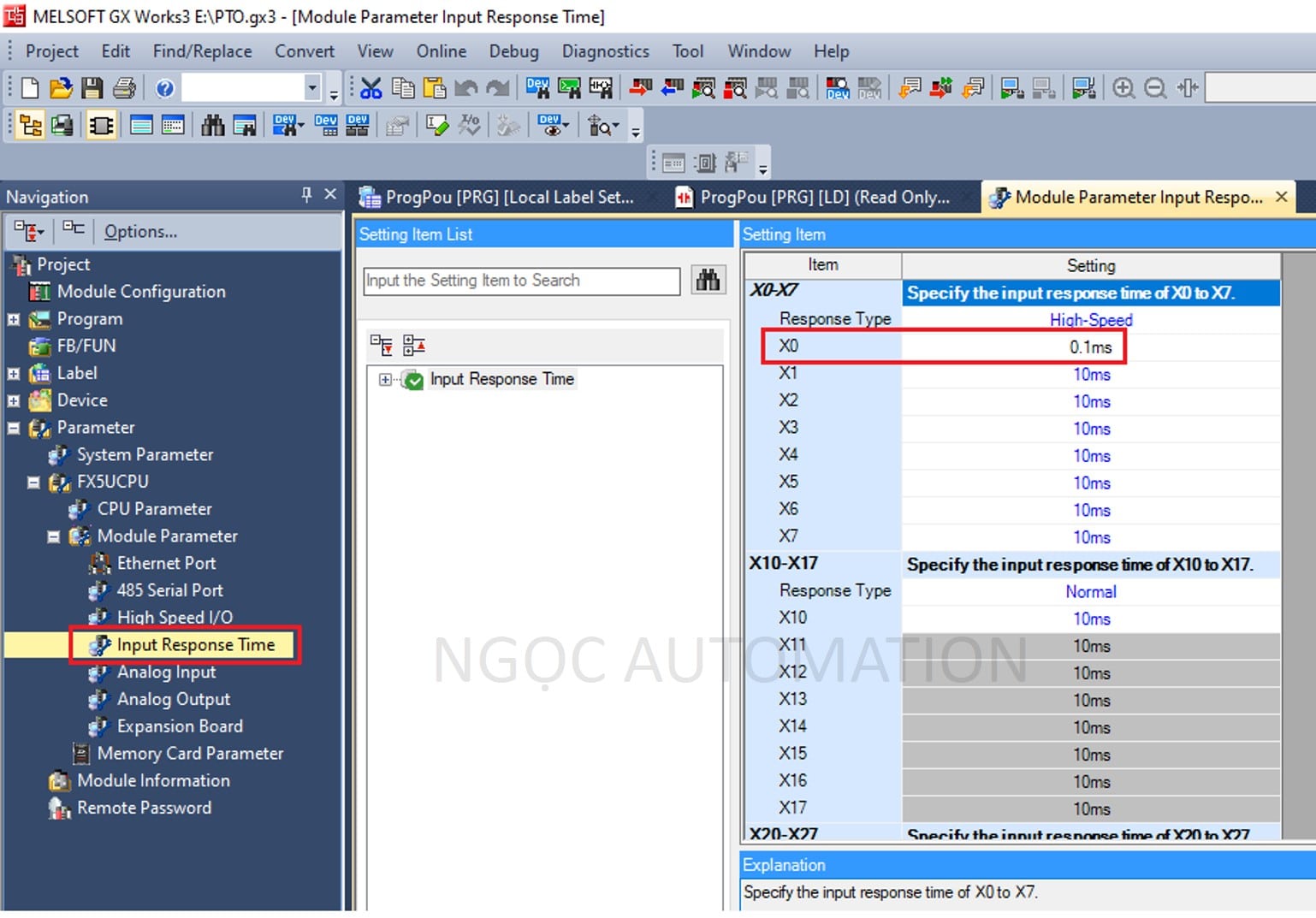
5.2. Cài đặt thời gian phản hồi
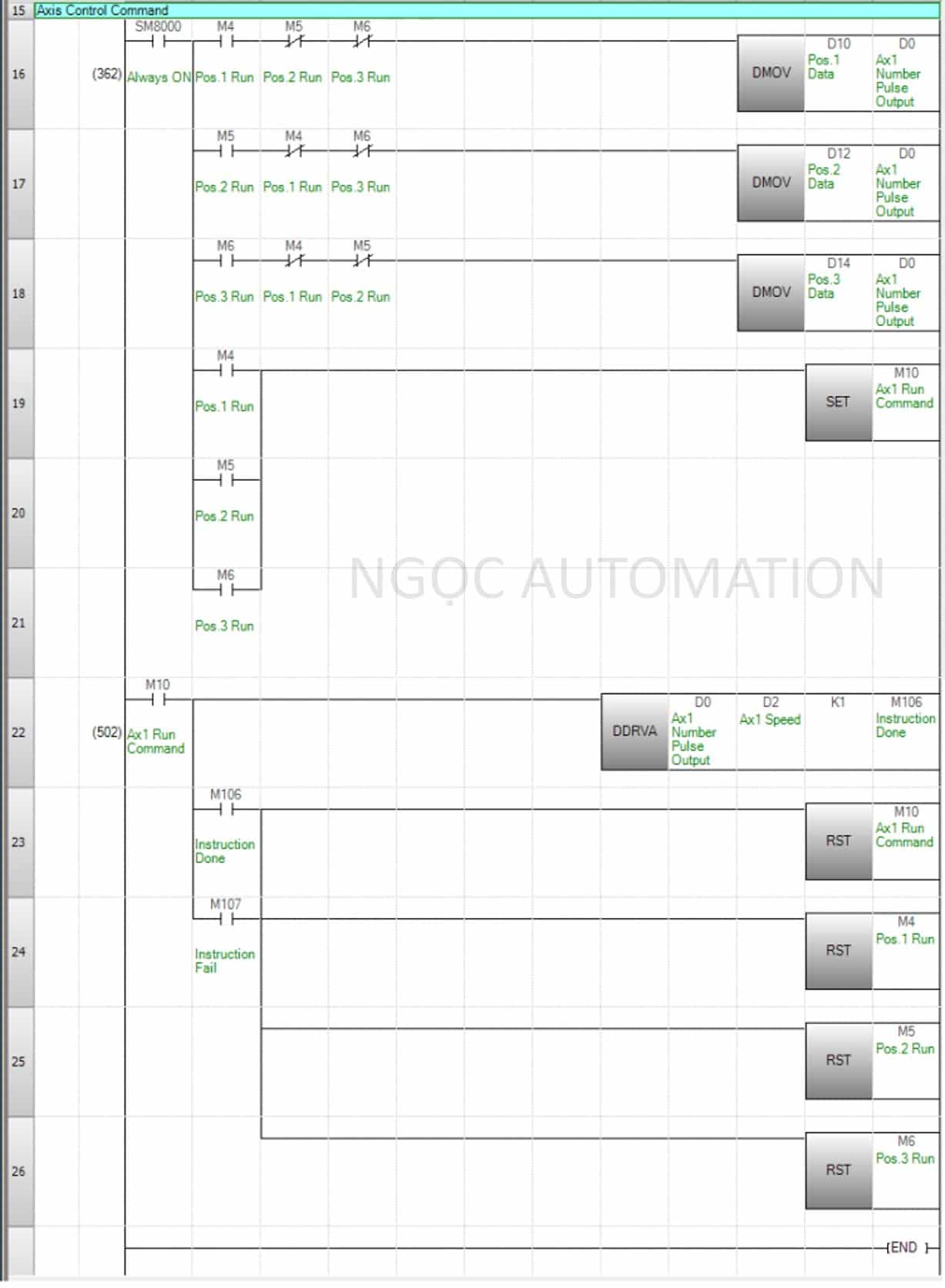
VI – Lập trình PLC
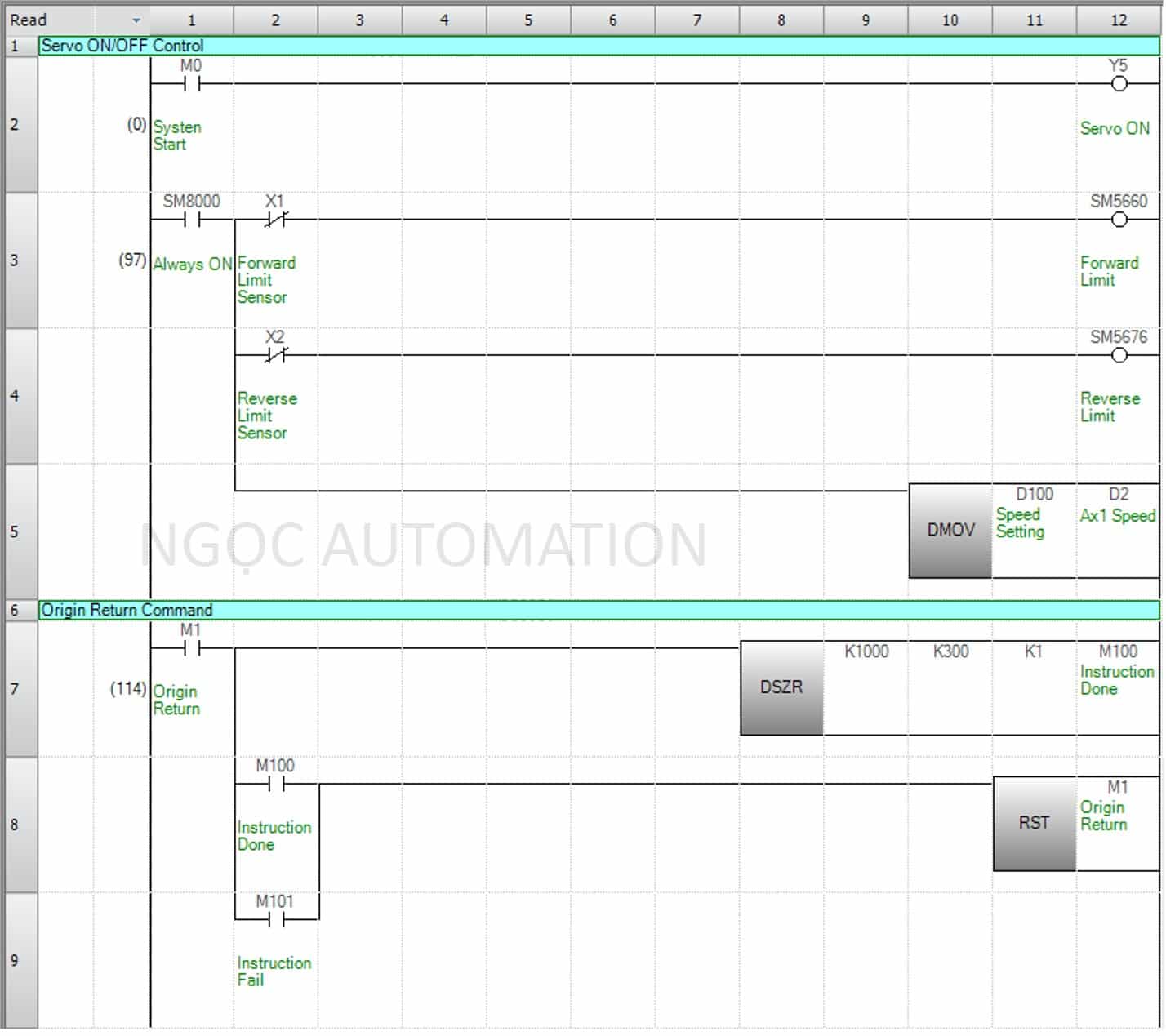
6.1. Lệnh Bật/Tắt Servo & Lệnh Trở về Gốc
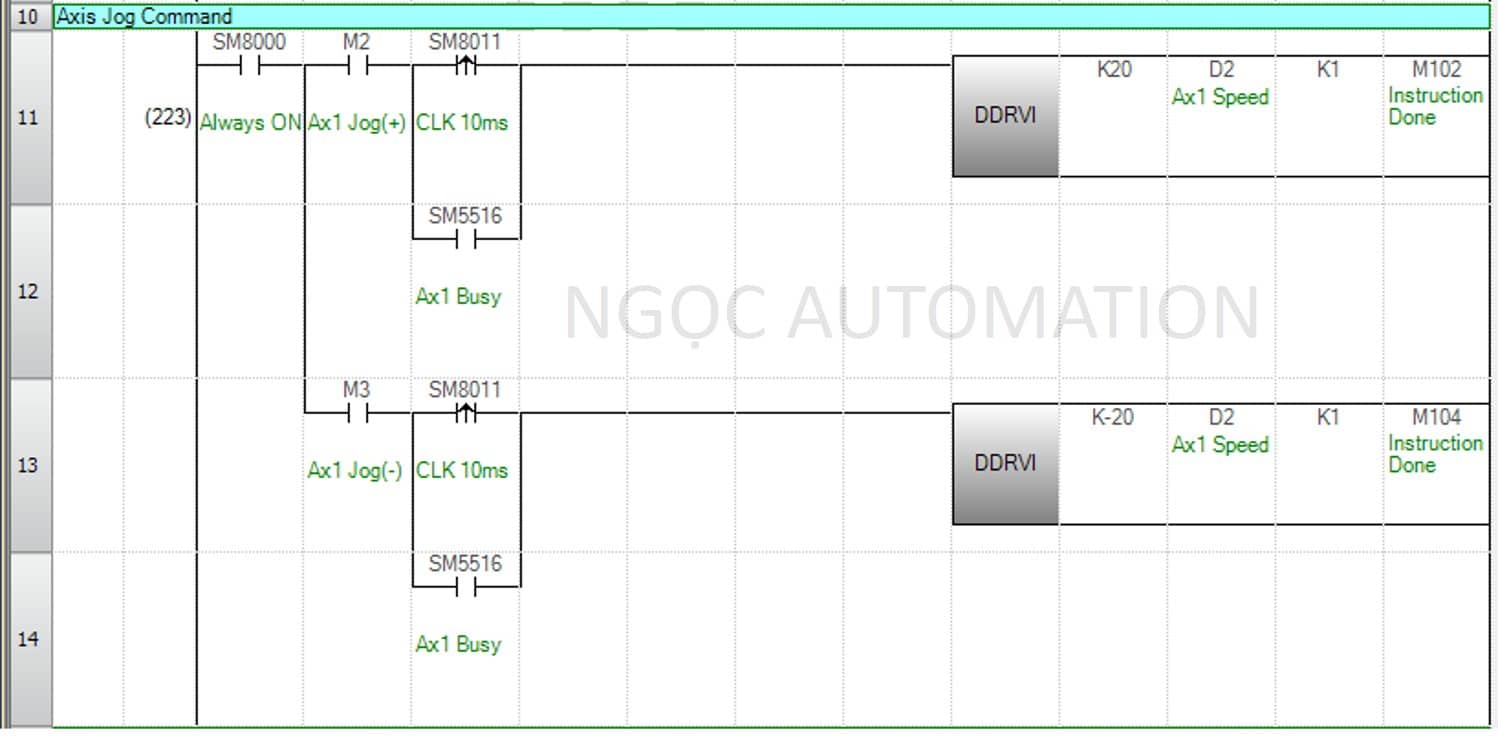
6.2. Lệnh Jog
6.3. Lệnh điều khiển vị trí