Bộ điều khiển PID trong PLC được sử dụng trong rất nhiều hệ thống tự động hóa, ví dụ như việc ổn định mức nước, ổn định áp suất cấp nước, ổn định nhiệt độ… Sau đây Ngọc Automation sẽ giới thiệu một số khái niệm quan trọng của bộ PID giúp bạn hiểu rõ hơn về chức năng nhiệm vụ và ứng dụng của nó trong tự động hóa
1. Bộ điều khiển PID là gì?
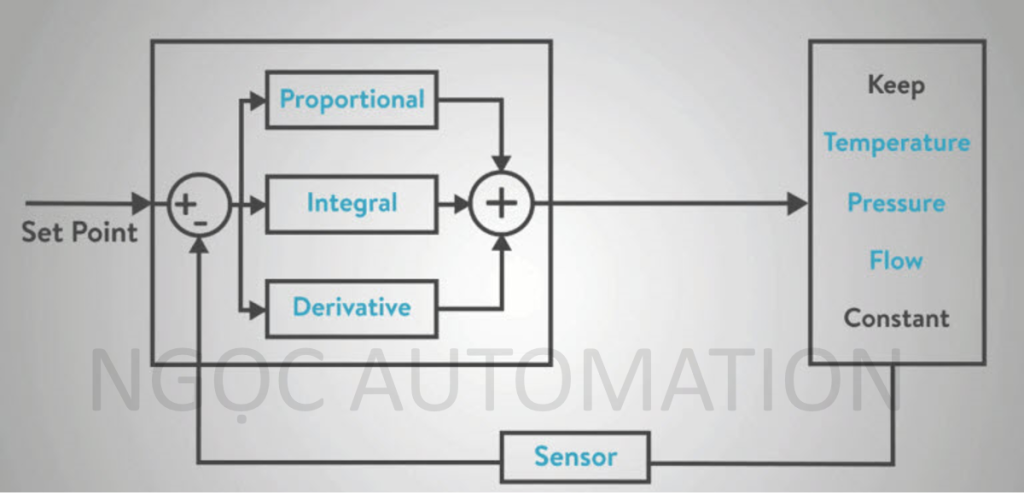
Bộ điều khiển PID (Proportional-Integral-Derivative Controller) là một hệ thống điều khiển phản hồi phổ biến trong các ứng dụng điều khiển tự động. Nó sử dụng ba thành phần chính: tỷ lệ (Proportional), tích phân (Integral), và đạo hàm (Derivative), để điều chỉnh đầu ra của hệ thống theo một giá trị đặc biệt, gọi là giá trị đặt (setpoint), dựa trên sự chênh lệch giữa giá trị thực tế và giá trị đặt đó. Bộ điều khiển PID được sử dụng rộng rãi trong nhiều lĩnh vực như công nghiệp, tự động hóa, điện tử, và các hệ thống tự động khác để duy trì hoặc điều khiển các thông số như nhiệt độ, áp suất, vận tốc, và vị trí.
2. Ví dụ về PID
Khi muốn điều khiển lò nung, thay vì đặt ngưỡng nhiệt độ cố định là 45°C và ngắt nhiệt khi đạt được, mà sử dụng bộ điều khiển PID, ta có thể điều chỉnh giá trị điều khiển ở đầu ra (Output) để giảm sai số và đảm bảo độ chính xác cao hơn. Bộ điều khiển PID sẽ tự động điều chỉnh giá trị điều khiển sao cho sự chênh lệch giữa giá trị thực tế đo được của hệ thống và giá trị cài đặt được giảm xuống gần như bằng không, tạo ra sự ổn định và đáp ứng nhanh chóng.
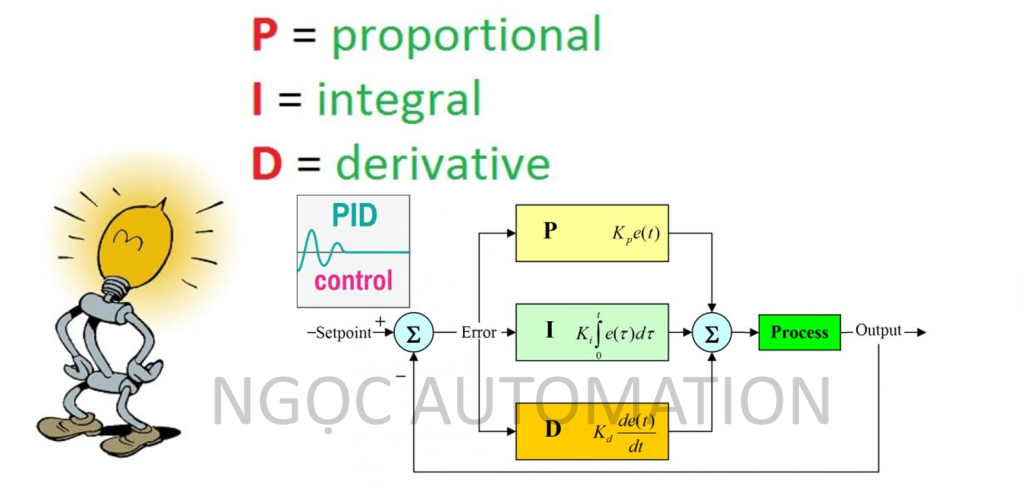
Các thành phần của bộ PID gồm:
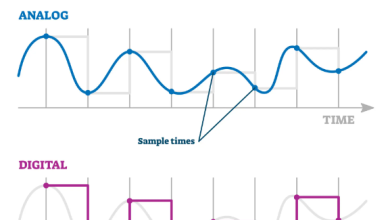
- P (Proportional): Là phương pháp điều chỉnh tỉ lệ, tạo ra tín hiệu điều chỉnh tỉ lệ với sai lệch đầu vào theo thời gian lấy mẫu.
- I (Integral): Là tích phân của sai lệch theo thời gian lấy mẫu. Điều khiển tích phân giúp giảm độ sai lệch về 0 bằng cách tạo ra tín hiệu điều chỉnh, thể hiện tổng sai số theo thời gian hoặc sai số tích lũy trong quá khứ. Thời gian lấy mẫu nhỏ hơn sẽ tăng cường ảnh hưởng điều chỉnh tích phân.
- D (Derivative): Là vi phân của sai lệch. Điều khiển vi phân tạo ra tín hiệu điều chỉnh phụ thuộc vào tốc độ thay đổi của sai lệch đầu vào. Thời gian lấy mẫu lớn sẽ tăng cường ảnh hưởng điều chỉnh vi phân, phản ánh bộ điều chỉnh phản ứng nhanh hơn đối với thay đổi đầu vào.
3. Nguyên lý hoạt động của bộ điều khiển PID
Bộ điều khiển PID có tổng cộng 4 loại điều khiển như sau:
- Bộ điều khiển tỉ lệ (Proportional Controller)
- Bộ điều khiển tỉ lệ và tích phân (PI Controller)
- Bộ điều khiển tỉ lệ và đạo hàm (PD Controller)
- Bộ điều khiển tỉ lệ, tích phân, và đạo hàm (PID Controller)
Hệ thống điều khiển PID tự động bao gồm:
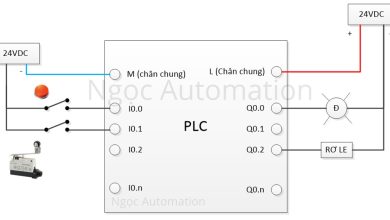
- Thiết bị điều khiển và cài đặt thông số (Ví dụ như: PLC, HMI, biến tần…).
- Cơ cấu chấp hành (Ví dụ Biến tần, thiết bị gia nhiệt…).
- Thiết bị phản hồi (Ví dụ: Encoder, cảm biến mức, cảm biến nhiệt độ, cảm biến áp suất…).
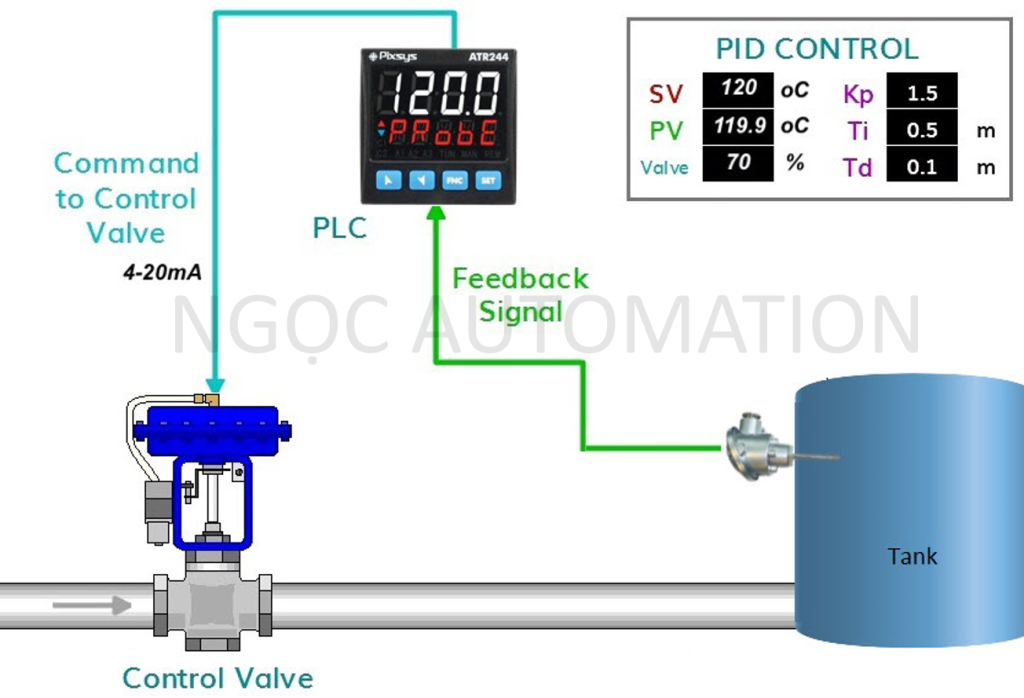
Một hệ thống điều khiển nhiệt độ PID sử dụng PLC và bao gồm các thiết bị sau: PLC, cảm biến đo nhiệt độ và thiết bị gia nhiệt. Các thuật toán điều khiển PI – PD – PID được mô phỏng trong PLC nhằm giúp dễ hình dung hơn về việc điều khiển nhiệt độ PID.
4. Đặc điểm của bộ điều khiển PID
PID được coi là bộ điều khiển lý tưởng cho các hệ thống điều khiển quy trình hiện đại, và được sử dụng rộng rãi trong các ứng dụng tự động hóa công nghiệp. Nó được áp dụng chủ yếu để điều chỉnh lưu lượng, nhiệt độ, áp suất, và nhiều yếu tố khác.
Công dụng của PID bao gồm:
- Giảm sai số đạt đến mức tối thiểu.
- Hạn chế độ dao động của hệ thống.
- Giảm thời gian cần để hệ thống đạt đến trạng thái ổn định và độ vọt lố trong quá trình điều khiển.
5. Điều khiển mức nước bằng PID
Để hiểu được sự quan trọng của việc sử dụng bộ điều khiển PID, chúng ta cần so sánh giữa phương pháp điều khiển bằng tay và điều khiển tự động. Hãy xem cách kiểm soát mức nước bằng cả hai phương pháp truyền thống và PID.
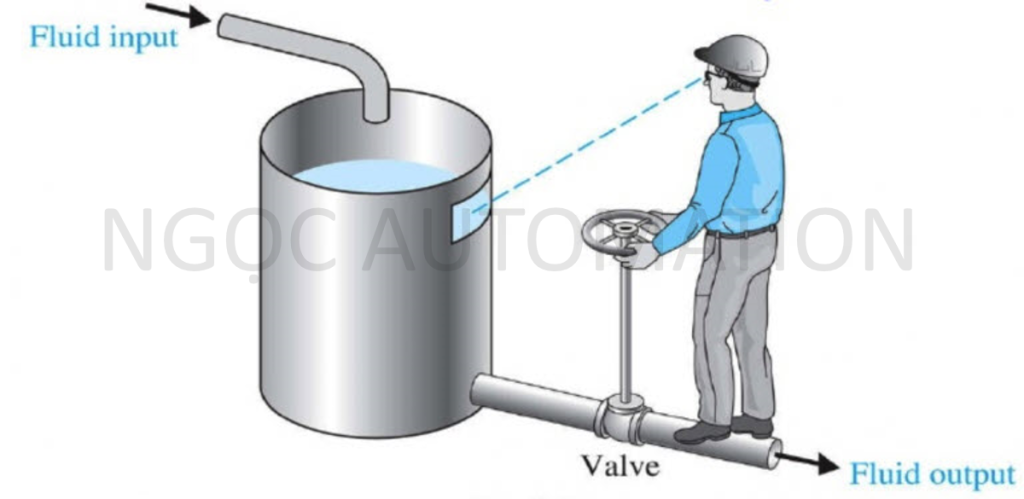
Quá trình điều khiển mức nước bằng phương pháp thủ công không chỉ có độ chính xác thấp mà còn mang lại cảm giác buồn chán và mất hứng thú. Để duy trì mức nước ổn định trong bể khi đang thêm nước vào và mở van xả ở dưới bể, người lao động phải dựa vào quan sát và điều chỉnh van theo mắt để đảm bảo mức nước luôn giữ ở một mức cho phép.
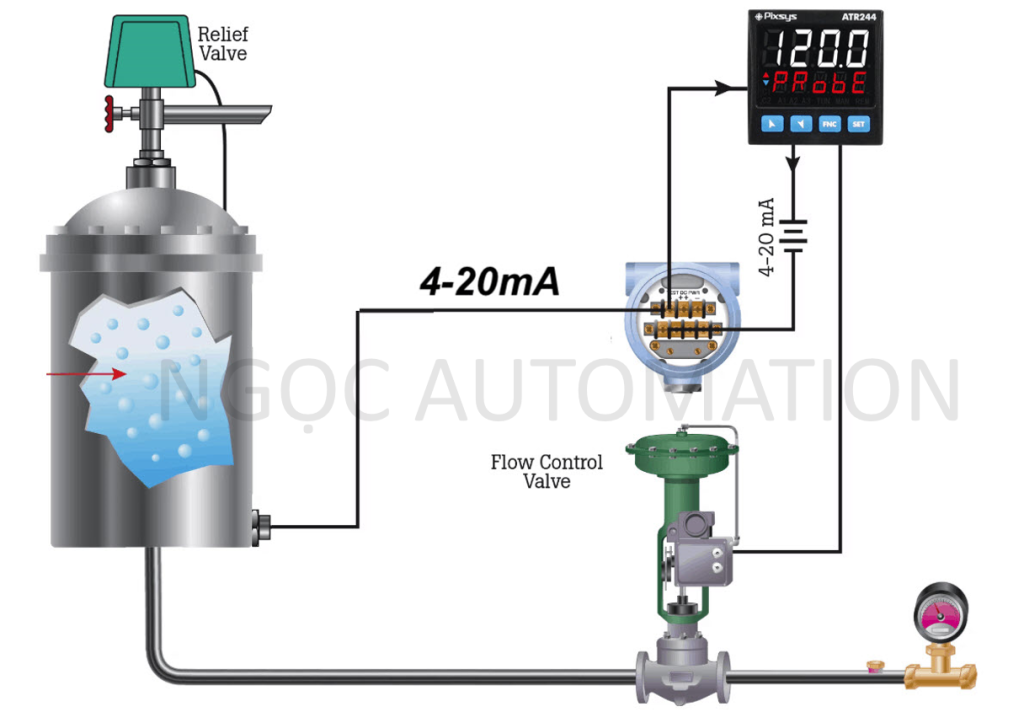
Trong trường hợp này, người điều khiển van được gọi là cơ cấu chấp hành, trong khi mắt của họ được coi là thiết bị đo mức nước. Nếu lượng nước xả vào quá lớn, van phải được mở rộng hơn để ngăn chặn sự tràn lan. Điều này trở nên đơn giản hơn nếu chúng ta áp dụng các hệ thống điều khiển PID để quản lý mức nước. Bộ điều khiển có thể hoạt động hoàn toàn tự động mà không cần sự can thiệp của con người, và yêu cầu các thành phần sau:
- Bộ điều khiển nhận tín hiệu 4-20mA từ đầu ra PID 4-20mA.
- Cảm biến đo mức nước cung cấp tín hiệu 4-20mA.
- Van điều khiển nước xả ra cung cấp tín hiệu 4-20mA.
- Mức nước đo được từ cảm biến, được gọi là biến quá trình (PV).
- Giá trị cài đặt (SV) là mức nước mong muốn. Khi SV khác với PV, PID sẽ tự động điều chỉnh để duy trì mức nước trong bể một cách chính xác nhất.
6. Bộ điều khiển PID trong PLC
Trong các hệ thống lớn sử dụng PLC / DCS để điều khiển PID, không cần phải sử dụng các bộ điều khiển PID độc lập. Trong PLC, các hàm PID sẵn có để điều khiển nhiệt độ, áp suất, lưu lượng, và đem lại kết quả chính xác tương đương với các bộ điều khiển PID độc lập.
Thách thức lớn nhất của PLC là việc lựa chọn các thông số để thực hiện thí nghiệm và tinh chỉnh để đạt được các hệ số PID chính xác nhất. Trong khi đó, các bộ điều khiển PID 4-20mA thường có tính năng tự động điều chỉnh để tìm ra các hệ số này với độ chính xác lên đến 98%.
Khi chúng ta hiểu các thông số PI – PD – PID, việc điều chỉnh các tham số để đạt được kết quả mong muốn trở nên đơn giản hơn.
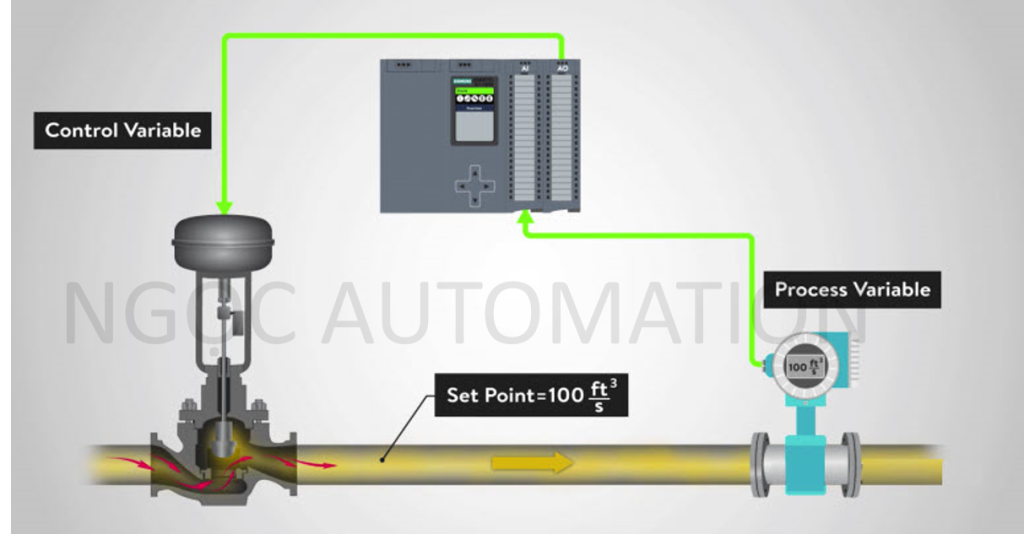
Ví dụ, van điều khiển nhận tín hiệu điều khiển từ PLC thông qua thiết bị hồi tiếp như đồng hồ đo lưu lượng. Khi cần lưu lượng đi qua van là 100m3/h, ta chỉ cần điều khiển trên màn hình HMI kết nối với PLC để truyền tín hiệu xuống van điều khiển.
Lưu lượng không còn phụ thuộc vào áp suất trong đường ống hoặc công suất của bơm, mà sẽ được điều khiển dựa trên tín hiệu từ đồng hồ đo lưu lượng truyền về.
Như vậy, việc điều khiển lưu lượng trở nên chính xác hơn mà không phụ thuộc vào công suất bơm hay áp suất đường ống, đặc biệt khi có sự rẽ nhánh của lưu lượng.